
国外科技媒体Tech Xplore对我组美学离子皮肤工作进行精选报道
报道链接:https://techxplore.com/news/2023-04-ionic-skin-robots-tactile-sensation.html
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adma.202300593
Roboticists have been trying to create increasingly enhanced artificial fingertips, as these could allow robots to discriminate the fine textures of objects and potentially even monitor atmospheric changed in their environment. While several skin-like materials have been proposed over the past few years, most of these do not effectively replicate the same tactile capabilities of humans.
Researchers at Donghua University in China recently introduced a new ionic skin that could be used to emulate the function of fingertips in robots. This skin, introduced in a paper in Advanced Materials, could ultimately allow robots to sense the tactile properties of objects and recognize different textures or materials.
"This work was initially inspired by the fingertips and fingerprints that we use to touch and perceive the world every day," Dr. Shengtong Sun, one of the researchers who carried out the study, told Tech Xplore. "Although numerous ’hard’ biomimetic fingertips have been reported in recent years, two key challenges remain in designing artificial ’soft’ ionic skins with fingertip-like tactile capabilities. One is how to overcome the strain interference in tactile pressure sensing; the other is achieving fine texture recognition like fingertips, which is also a manifestation of high tactile sensitivity."
As part of their recent study, Dr. Sun and his colleagues set out to overcome these two key challenges generally faced when trying to develop soft skins comprised of ions, also known as ionic skins. To do this, they first pondered on how they could form and characterize fingerprint patterns on a soft material, ultimately mimicking both the structure and function of human fingertips.
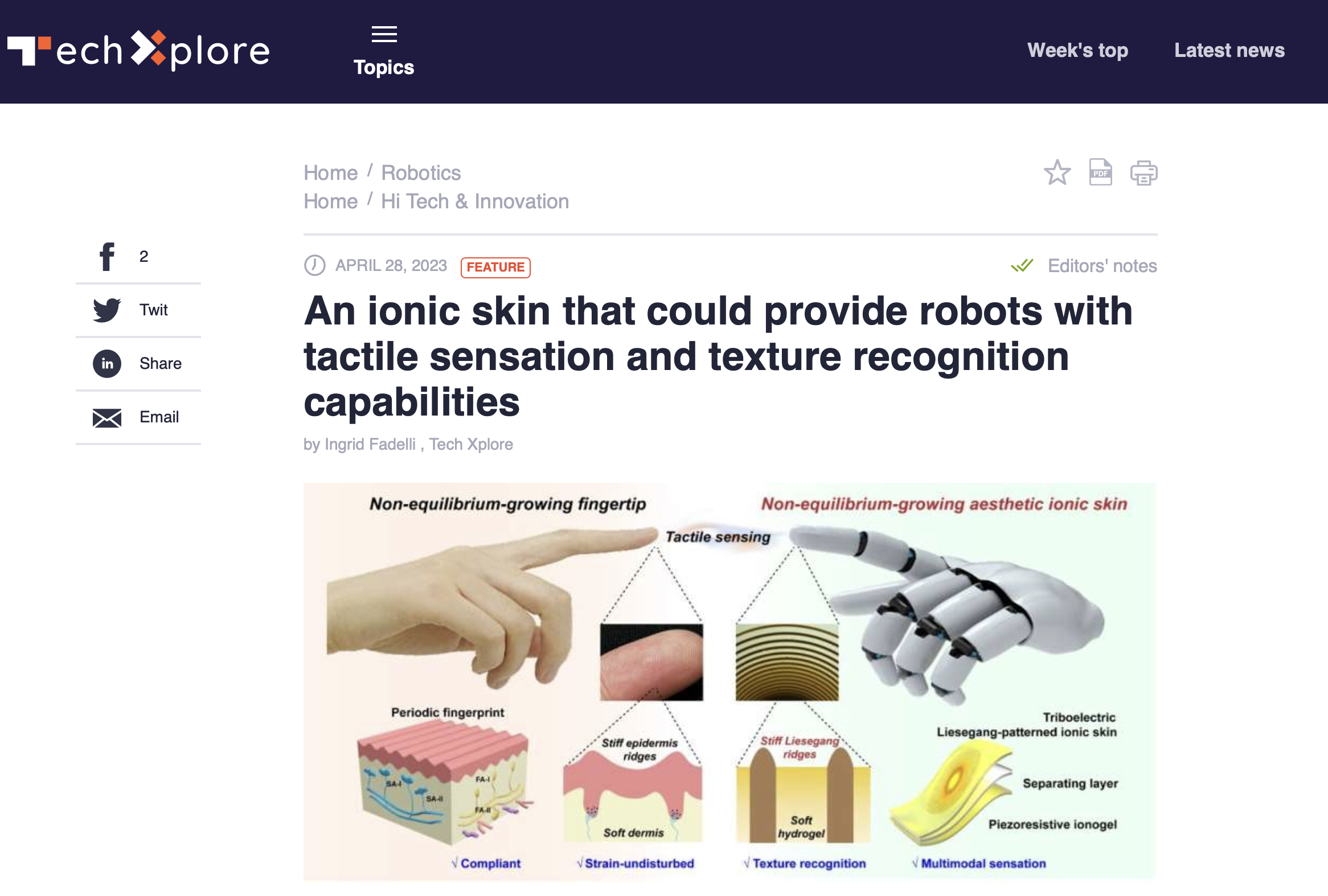
"We noticed that fingertips are featured with a modulus-contrast fingerprint structure with periodic ridges and valleys," Dr. Sun explained. "Such an endogenic periodic pattern is believed to be created by a non-equilibrium reaction-diffusion process from the biochemical Turing effect."
When fingertips are sensing the tactile properties of the objects they are touching, the rigid ridges inside them are theorized to act as mechanical microlevers that can quickly transmit tactile vibration signals to receptors in the dermis (i.e., thick layer of tissue below the skin’s outer layer). These ridges only slightly deform when in contact with surfaces or objects, allowing them to retain an almost constant contact with them. As a result, the pressure sensitivity of fingertips is almost free from strain distortion.
"Inspired by these features of fingertips, we fabricated an aesthetic ionic skin also grown from a non-equilibrium Liesegang patterning process," Dr. Sun said. "Interestingly, such an aesthetic ionic skin was shown to possess the fingertip-like strain-undisturbed pressure sensitivity as well as the ability to recognize textures."
To create this aesthetic ionic skin, Dr. Sun and his colleagues used a Liesegang patterning strategy, which entails a precipitation reaction to create patterns in hydrogel materials. Using this technique, they created stiff ridges embedded in an elastic hydrogel, resembling those observed in human fingertips.
"Liesegang patterning generally occurs when a precipitation reaction is coupled with the mass transport of reagents in porous gel media, leading to periodic bands of precipitates," Dr. Sun said. "By coating it with a fluoroelastomer layer, the Liesegang-patterned ionic skin can act as a highly sensitive triboelectric tactile sensor. Benefitting from the modulus-contrast of soft valleys and rigid ridges, the triboelectric tactile sensor can sensitively detect dynamic pressure stimuli as well as recognize fine textures and shows almost unchanged pressure sensitivity even when stretched to the maximum failure strain (~50%) of human skin."
The researchers assembled the patterned ionic skin they created with another piezoresistive ionogel to mimic the biological multimodal tactile sensory system even more realistically. In a series of preliminary test, the resulting artificial skin-like tactile sensor achieved highly promising results, sensing tactile information even when it was stretched.
"This work creatively introduces the non-equilibrium reaction-diffusion phenomenon into the design of ionic sensing materials," Dr. Sun said. "The resulting aesthetic ionic skin with periodic Liesegang patterns is featured with stiff ridges embedded in a soft hydrogel matrix. Such a modulus-contrast hybrid structure endows the ionic skin with intriguing tactile sensing properties of triboelectric-based strain-undisturbed pressure sensitivity and fine texture recognition, which have rarely been achieved in previous artificial ionic skins."
In the future, the hydrogel-based artificial tactile sensor developed by this team of researchers could be used to create soft robotic skins or artificial fingers that can acquire dynamic and static pressure signals in real-time while a robot is grasping objects. In addition, the work by Dr. Sun and his colleagues could inspire the creation of other promising ionic skins for robotics applications using Liesegang patterning.
"The Liesegang-patterned aesthetic ionic skin was fabricated on a hydrogel substrate, and the resulting material has a certain thickness of about 2 mm," Dr. Sun added. "This may not be thin enough to meet future soft robotic applications. In our next studies, we will try to introduce Liesegang patterns into an ultra-thin matrix to prepare thin-film artificial ionic skins."
转载自Tech Xplore官网